快速开始⚓︎
准备工作⚓︎
自主飞行平台⚓︎
- 飞机本体 x 1
- 满电4s电池 x 1
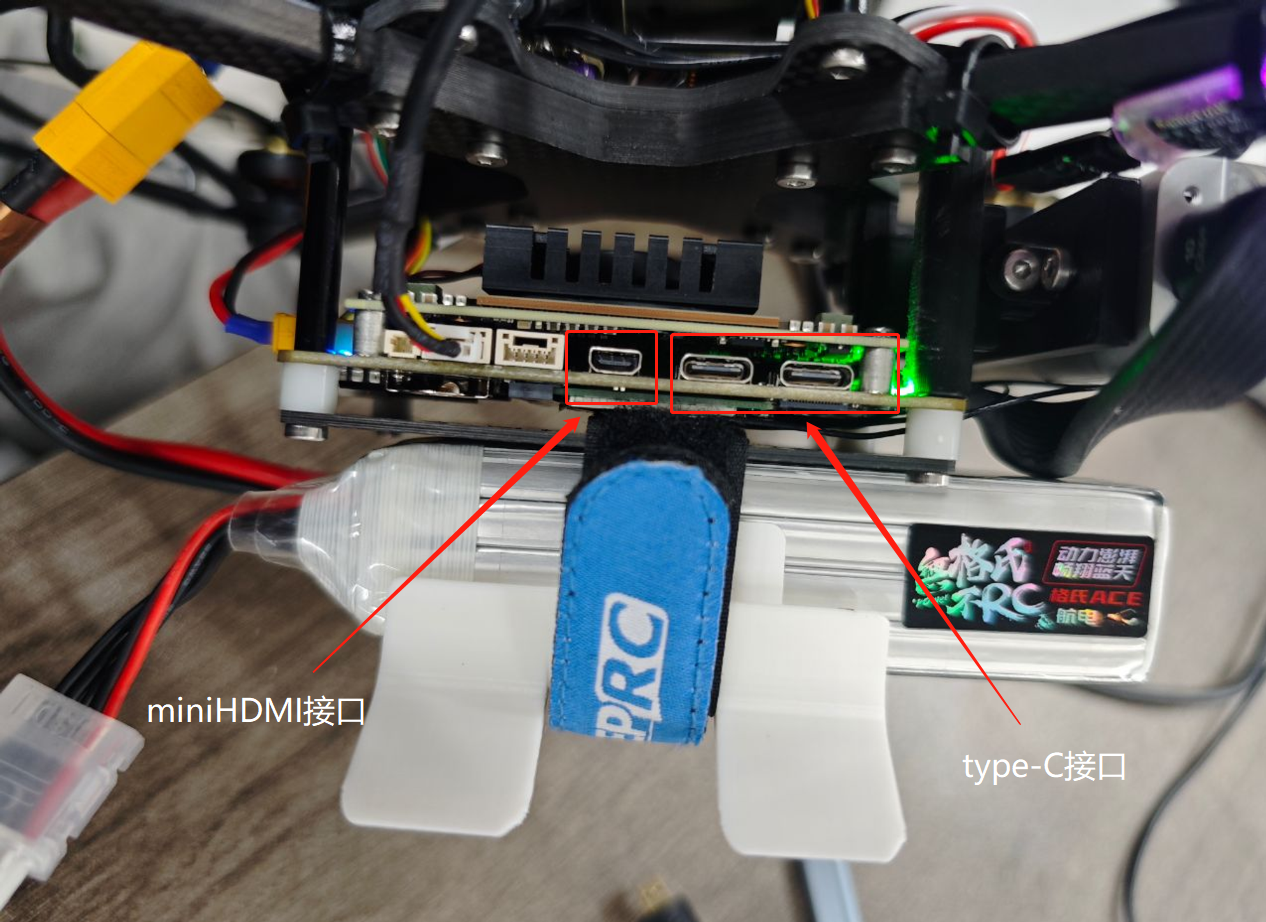
- mini-HDMI线 x 1
- 显卡欺骗器 x 1
自行准备⚓︎
- 路由器 x 1
- 计算机(地面站) x 1
- 显示器 x 1
- type-C 拓展坞 x 1
- 鼠标 x 1
- 键盘 x 1
若第一次使用⚓︎
- 提前在地面站上安装NoMachine (飞机上已经安装好,只需地面站上安装即可)
- windows下载链接:https://downloads.nomachine.com/windows/?id=3
- Linux下载链接:https://downloads.nomachine.com/linux/?id=1
-
若第一次使用,请先将飞机机载电脑连接至路由器
- 先连接mini HDMI线至显示器,插入type-C拓展坞连接键盘和鼠标。
- 在ubuntu系统界面,将机载计算机连上路由器的WiFi,记录飞机设备ip。可以在终端输入指令查看ip
ifconifg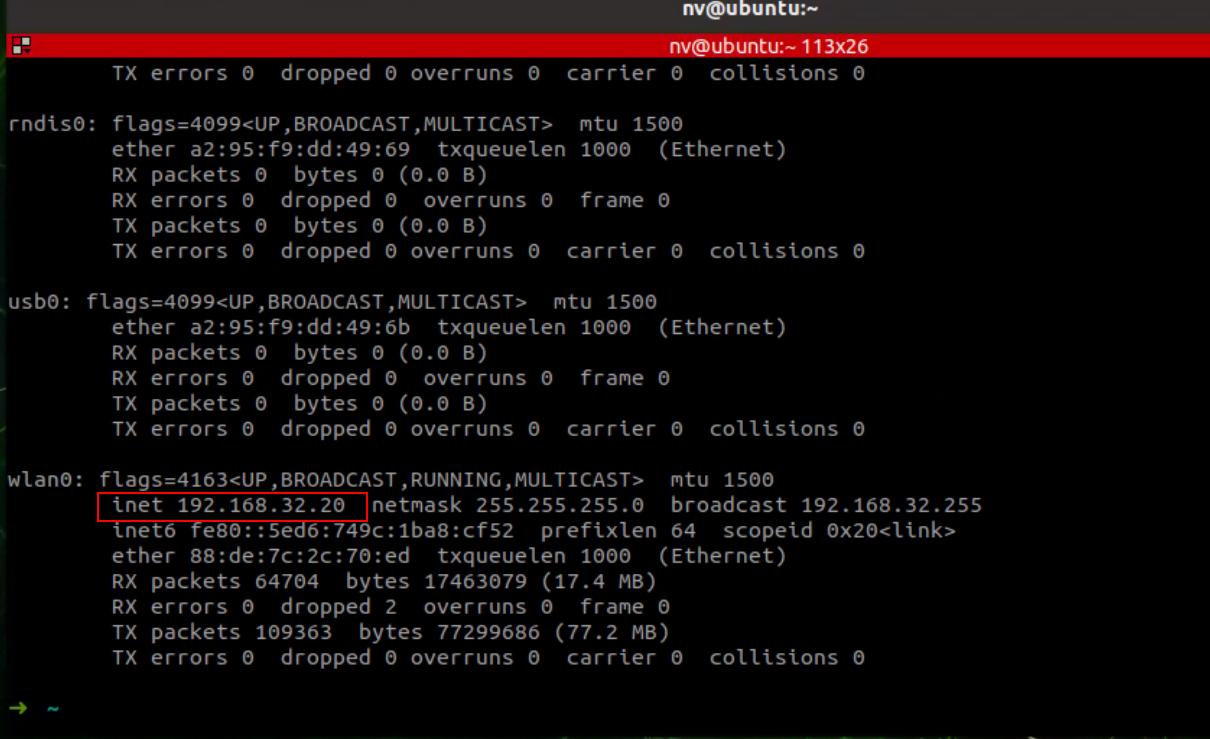
操作手须知⚓︎
遥控器说明⚓︎
| 7通道(第一优先级) | 上:电机使能 下:急停 |
|---|---|
| 5通道(第二优先级) | 远离操作手端:遥控器手动控制姿态 靠近操作手端:接入px4_ctrl |
| 6通道(第三优先级) | 上:接入px4_ctrl遥控器控制位置 下:接入px4_ctrl跟踪轨迹 |

在飞行时遇到紧急情况?⚓︎
- 定位崩溃
- 体现在飞机姿态剧烈变化,严重失控
- 处理措施:拨下7通道,紧急停桨。
- 定位未崩溃,轨迹跟踪异常
- 体现在飞机姿态基本稳定,严重失控
- 处理措施:6通道上拨,自稳停于原地,通过下拨油门杆,缓慢降低飞机高度。在合适较低高度处,油门保持最低位,拨下7通道,紧急停桨,然后终止所有程序。
简单自主飞行部署⚓︎
- 检查周围环境是否安全,如是否可能对行人、车辆造成安全隐患。禁止在可能造成安全隐患的场景进行飞行测试。
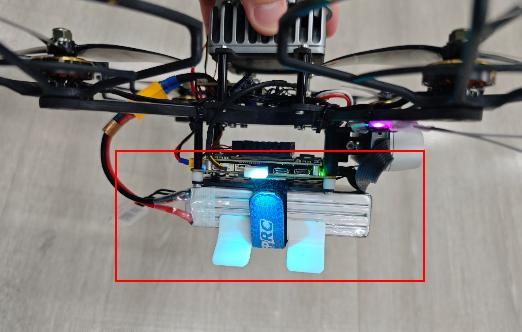
- 将配套4s电池置于在飞机底座和电池基座之间,并用扎带固定牢固
- 将飞机摆放在可以安全起飞的位置。为安全起见,机头朝前,机尾朝地面站。

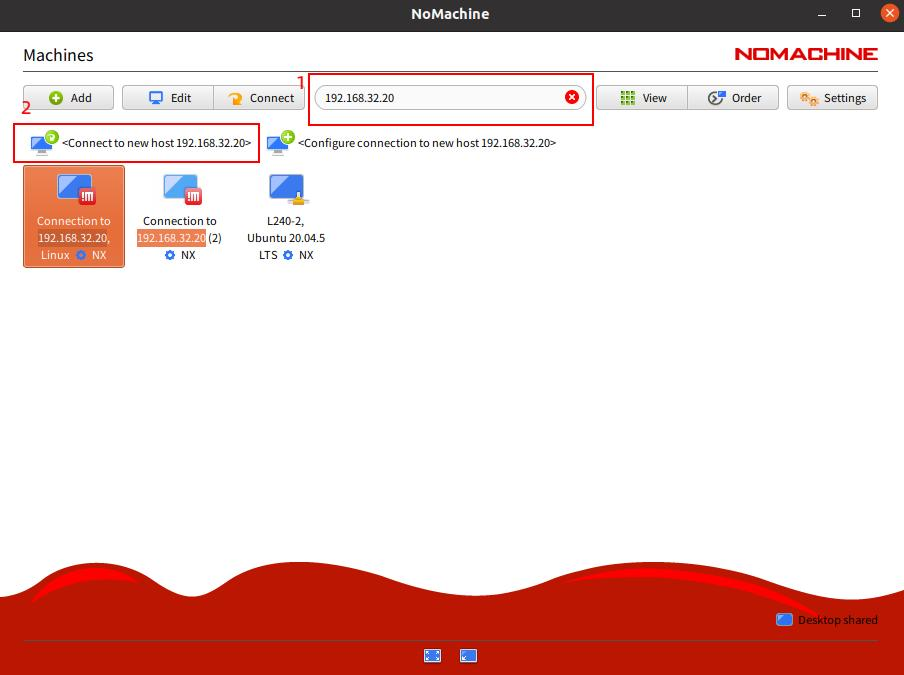
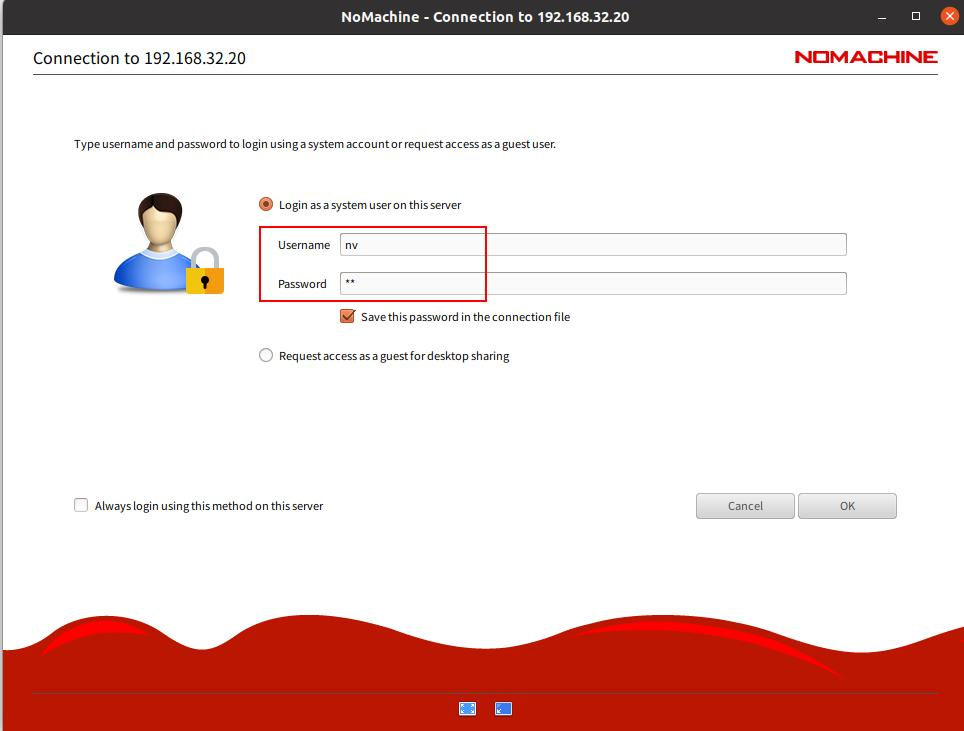
- 使用笔记本,将其连上相同路由器WiFi,通过NoMachine连接到飞机计算机的远程桌面。(用户名与密码即为nv)
- 将遥控器调整至自主起飞前对应档位
- 7通道:最上
- 5通道:操作手端
- 6通道:最下
-
打开Terminator,按 Alt+A 在所有窗口广播指令
cd pn_ws/ego_lidar_ws进入自主飞行工作空间,输入指令
source devel/setup.zsh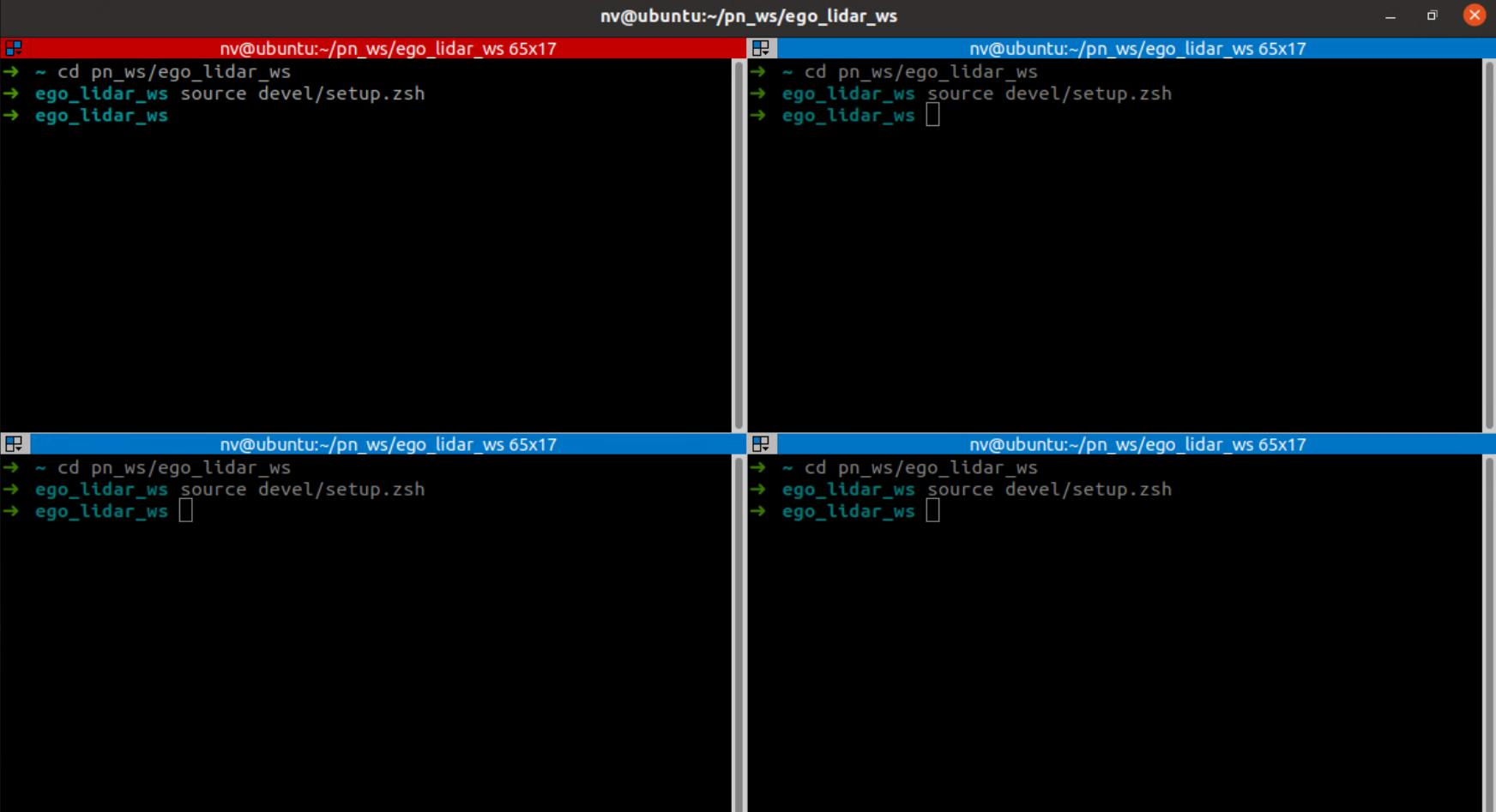
-
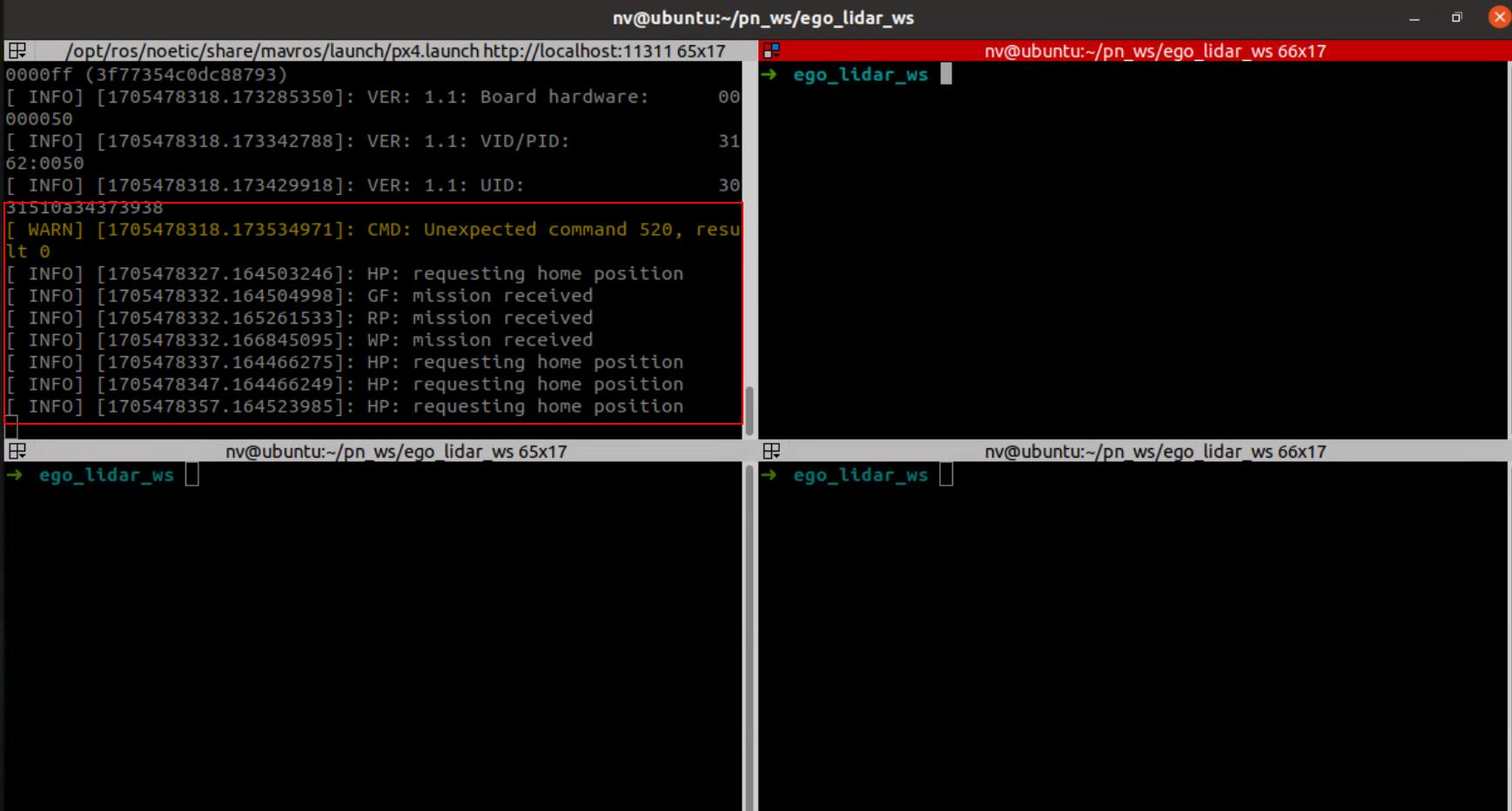
第一个终端启动mavros的ros节点,输入指令
px4_run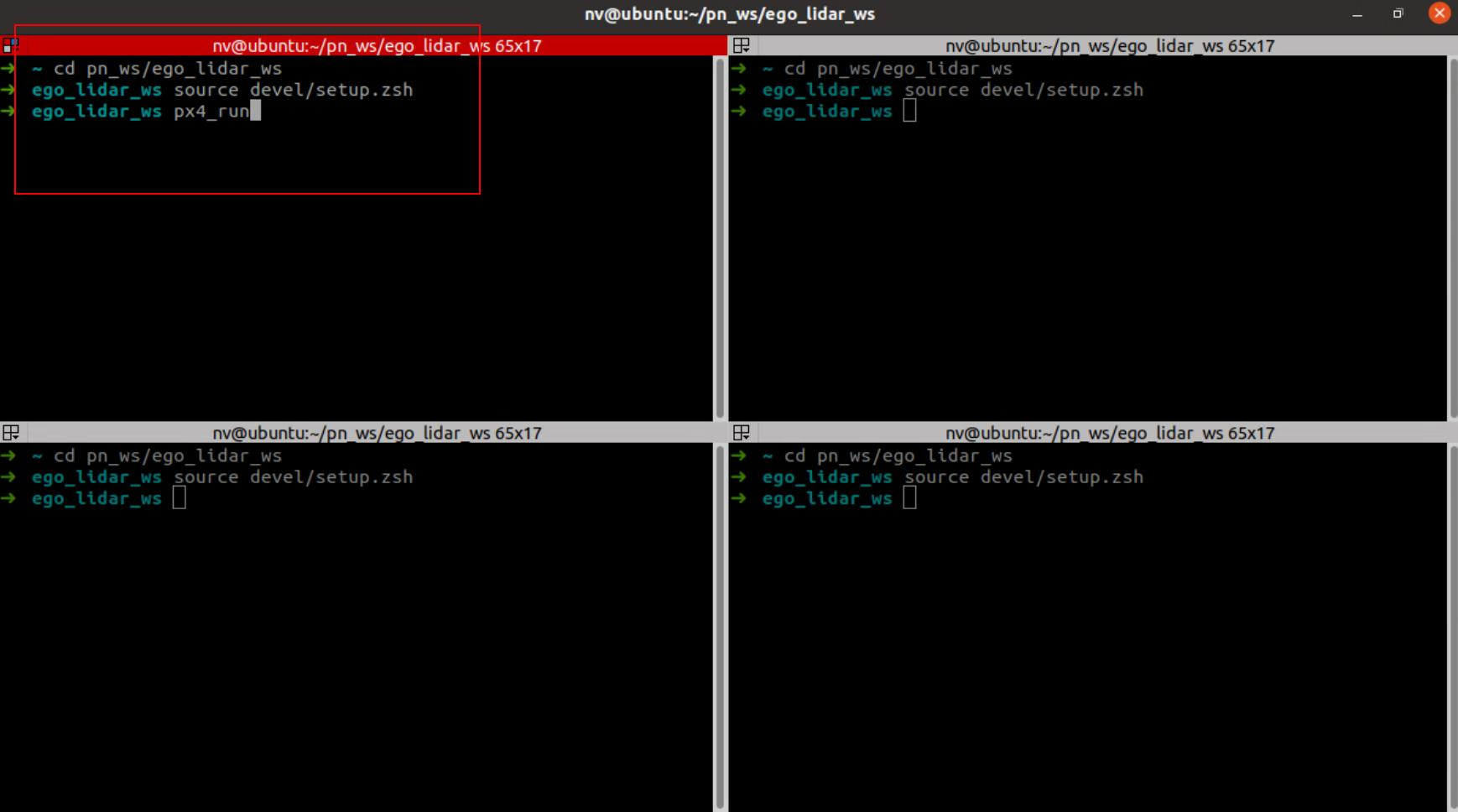
看到终端内有以下输出内容为正常启动px4
-
第二个终端启动自主飞行的一系列程序,输入指令
ego_run
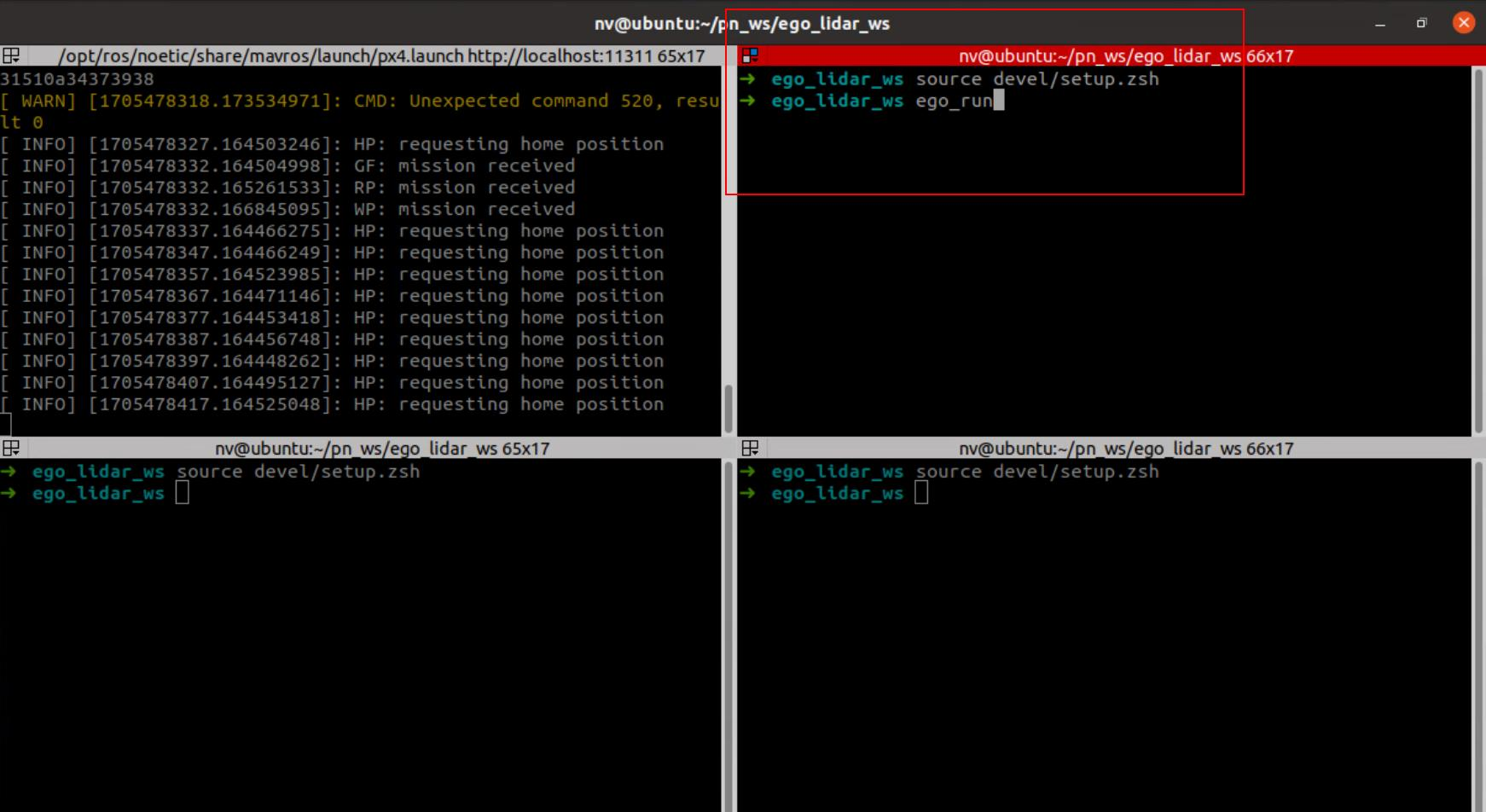
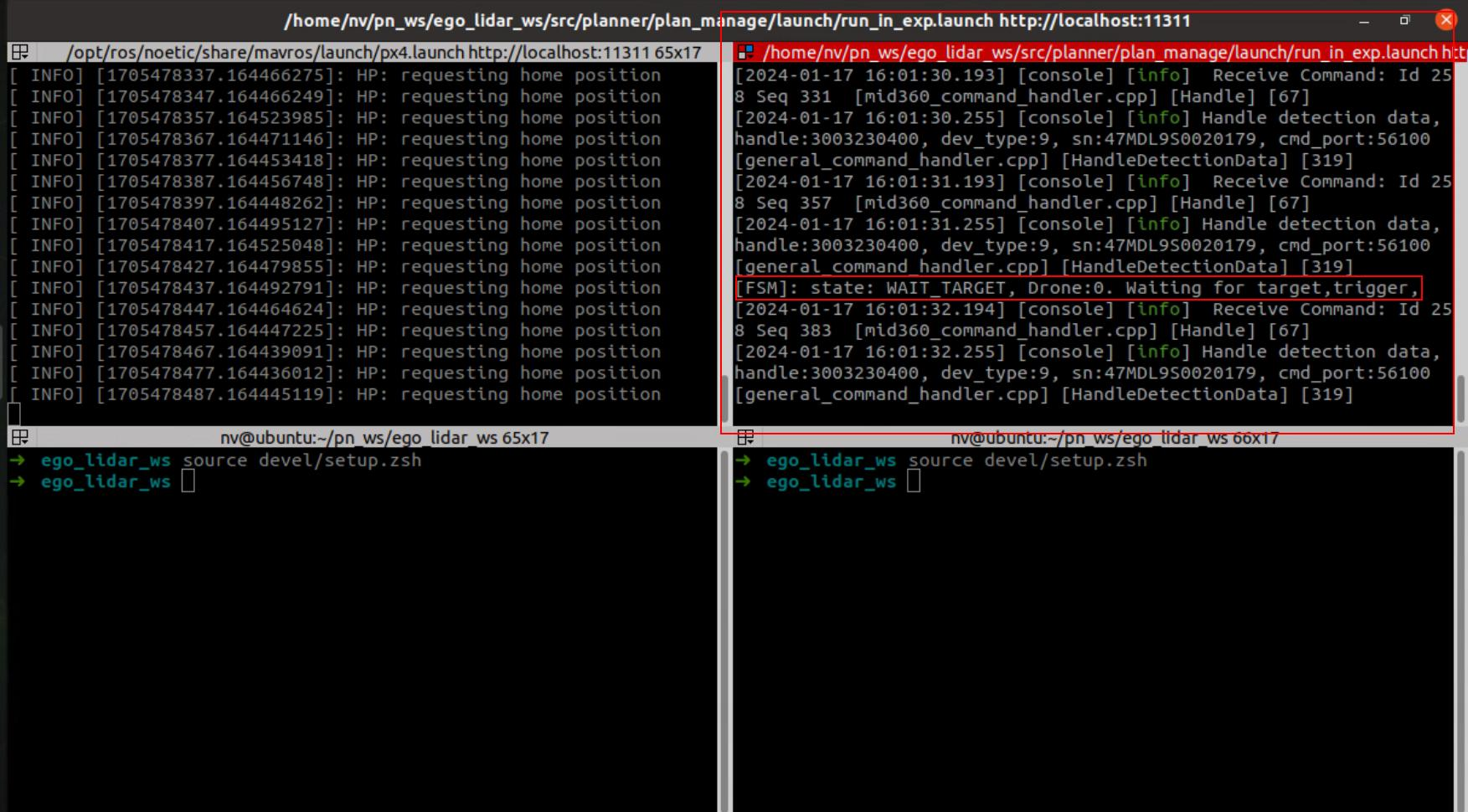
所有程序启动完毕大约用时大约15秒左右,
-
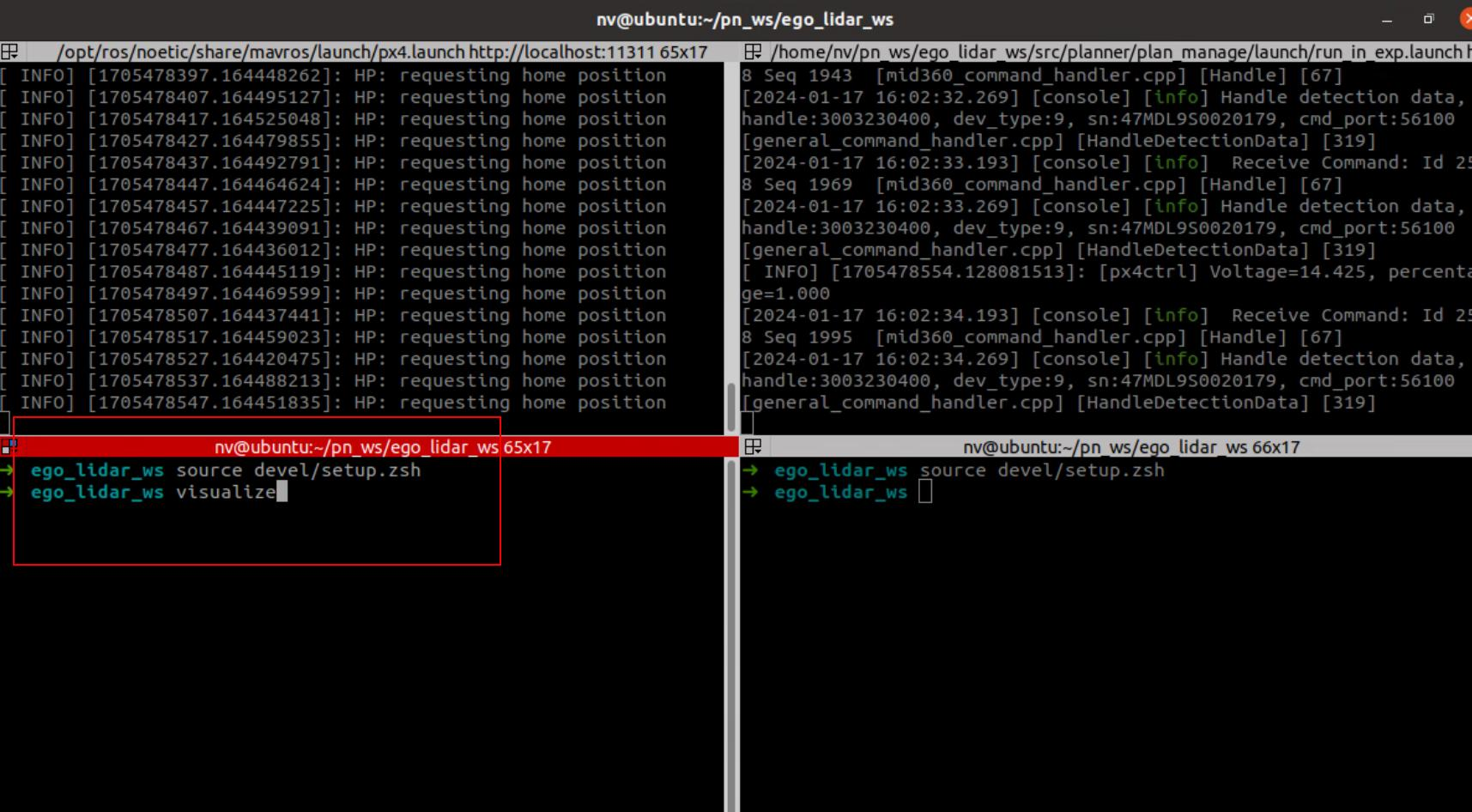
第三个终端启动可视化程序rviz,输入指令
visualize
-
确定一切准备就绪:
- 遥控器油门置于中位
- 四周安全,不存在人身财产安全隐患
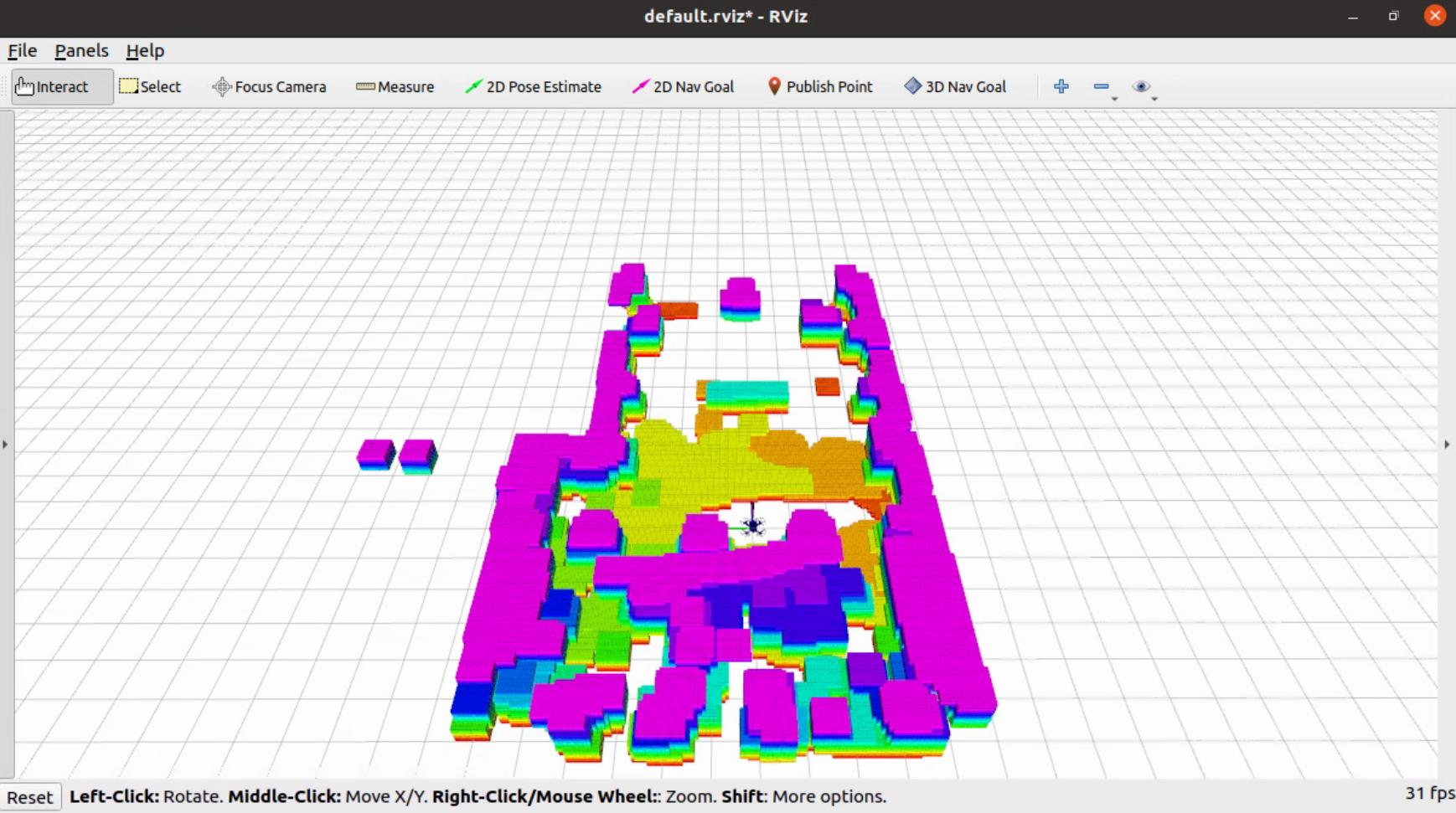
- 可视化程序rviz中**可视化地图实时刷新**、飞机姿态现实正常
-
输入飞机起飞指令
takeoff可见飞机自动起飞,悬停于约离地1.2m高度处。

-
在rviz中,使用3D Nav Goal在画面中设置目标点
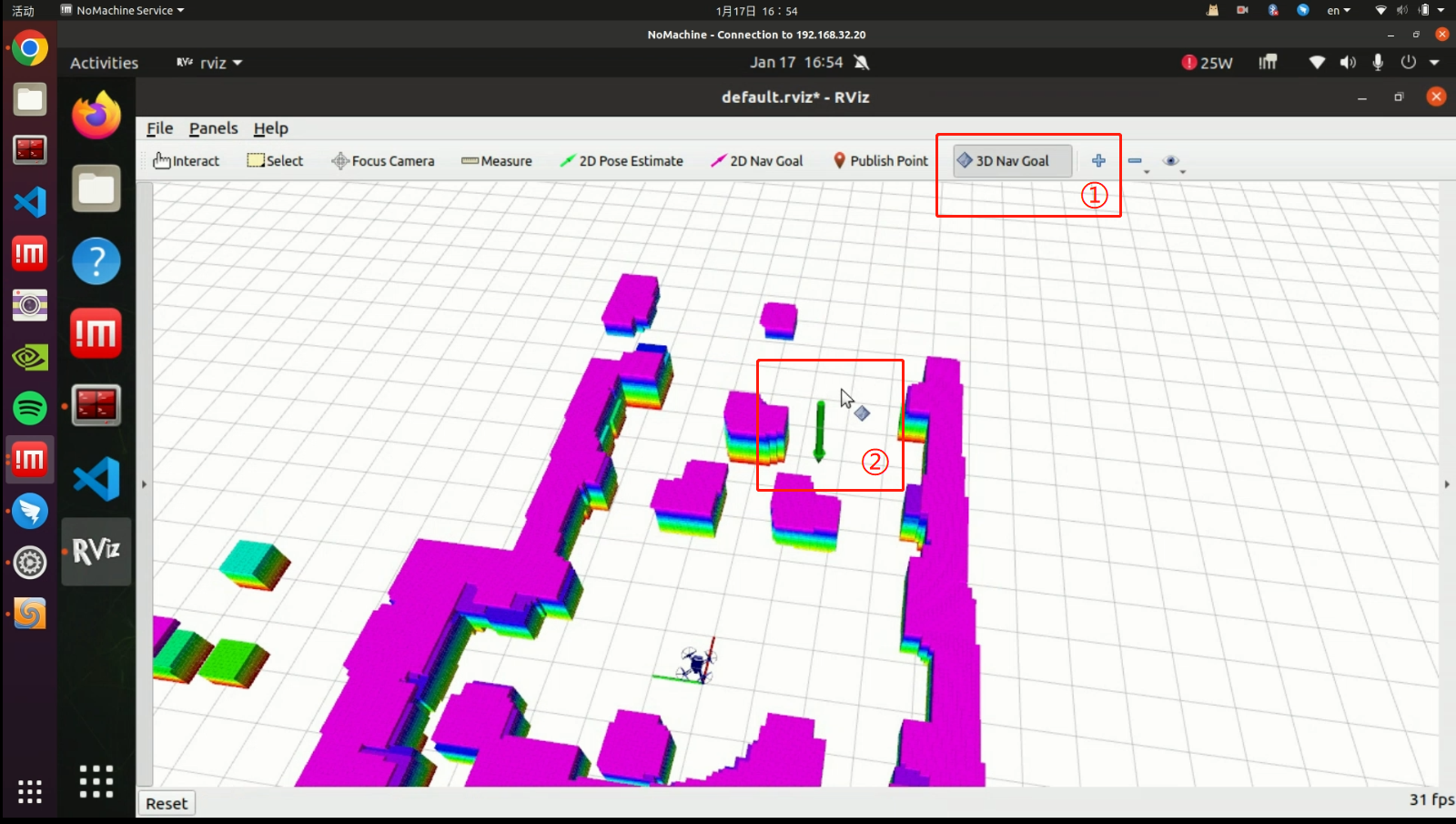
在当前设置中,设置目标点仅获取 \((x,y)\) 信息,不获取高度、偏航角信息。
-
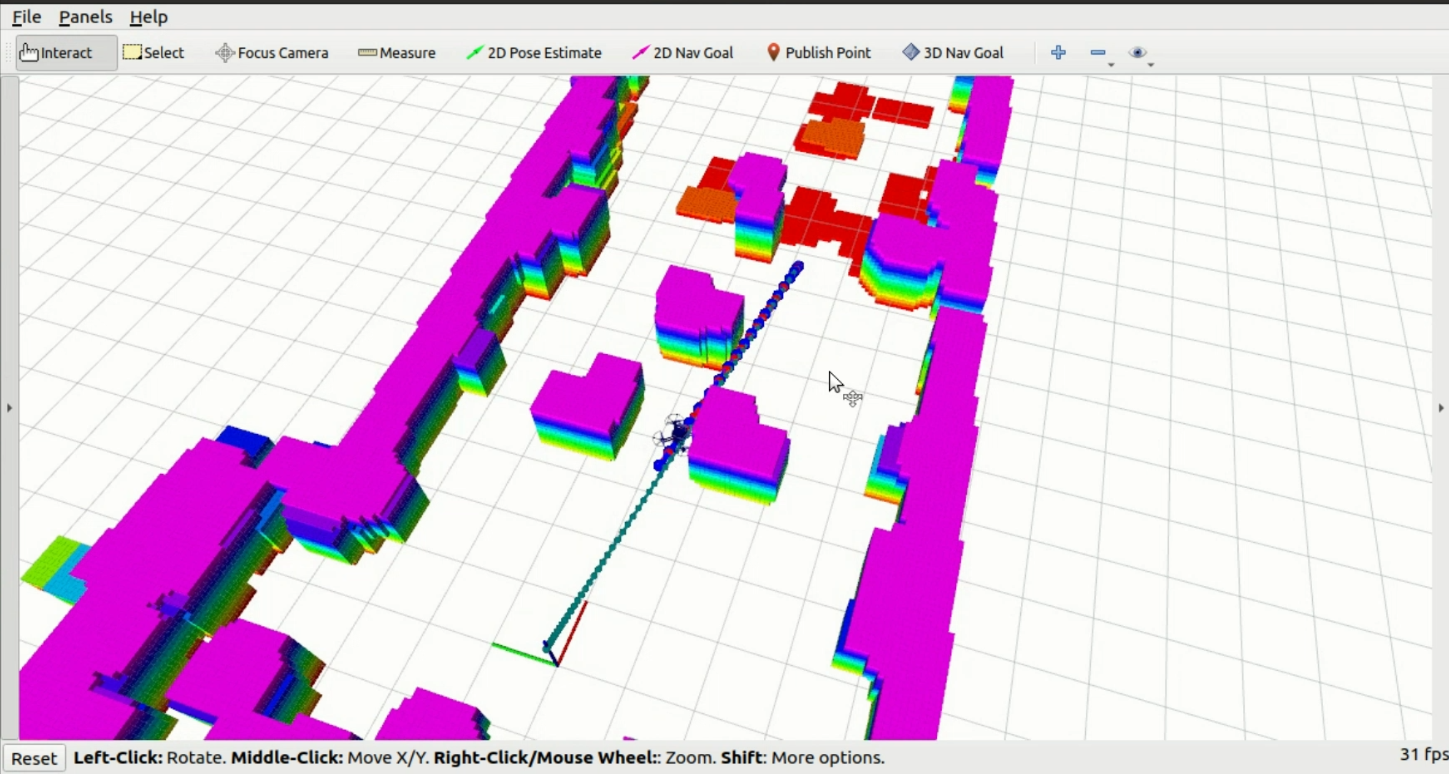
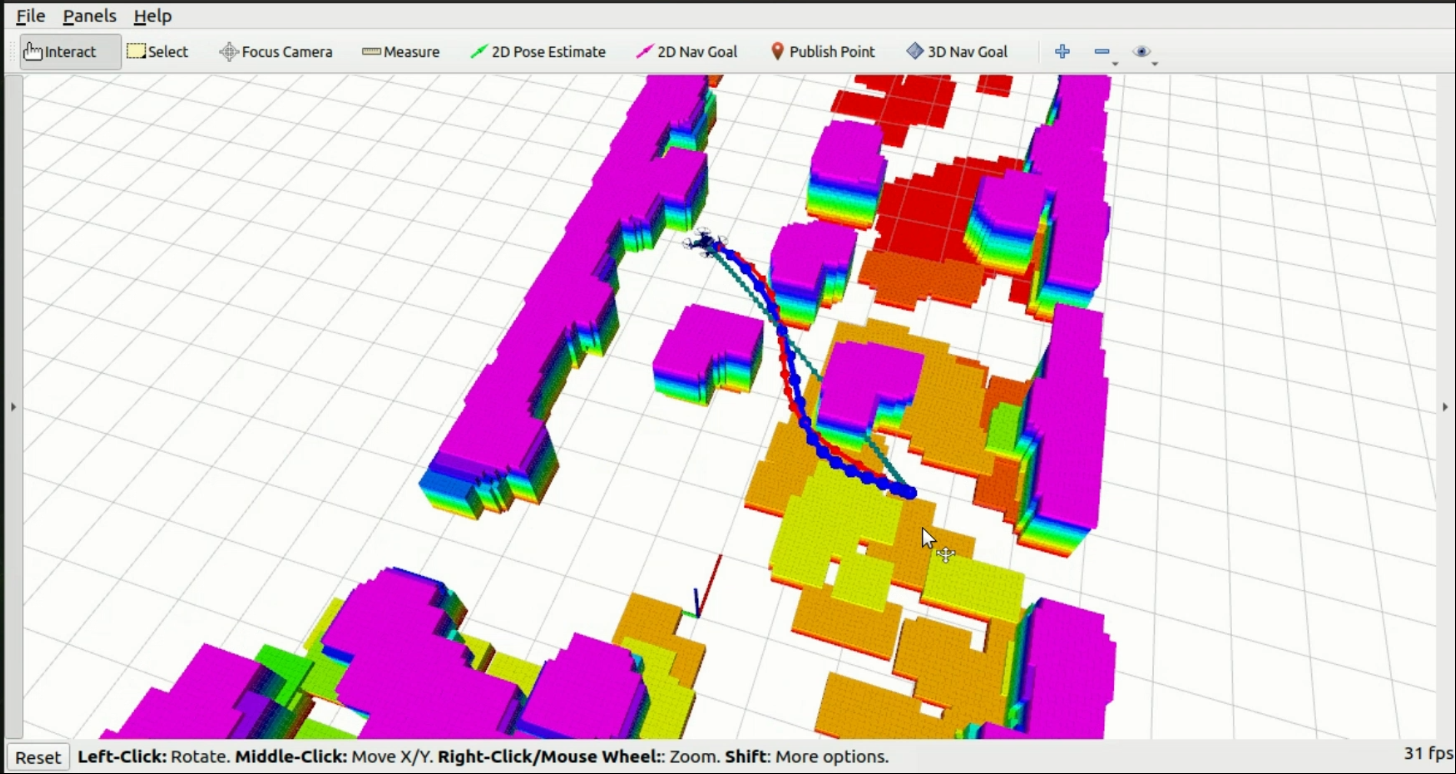
飞机根据当前所感知环境,进行实时在线自主规划,想目标的移动,红色轨迹为所规划轨迹。
-
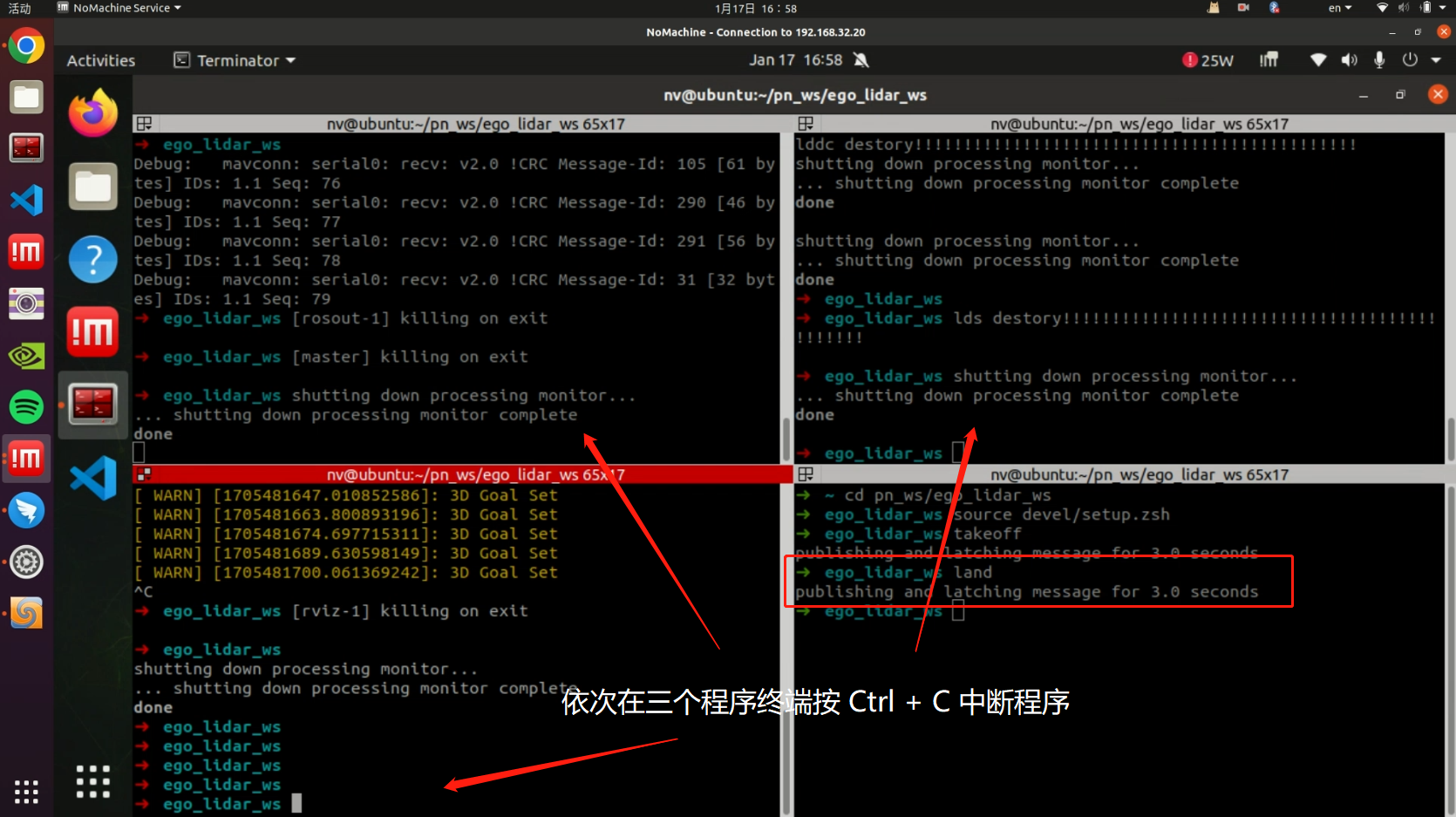
在需要降落飞机时,在空闲终端输入降落指令
land飞机自主下降,在降落到最低位置后,安全起见将7通道下拨,油门置于中位,使飞机电机下电。
指定途径点轨迹规划⚓︎
- 使用code打开 ~/pn_ws/lidar_ego_ws/src 文件夹
- 编辑参数文件 ~/pn_ws/lidar_ego_ws/src/planner\plan_manage\launch\run_in_exp.launch
- 修改位于39行参数 flight_type 为 2,使得使用全局途径点规划轨迹
- 修改位于42行参数 point_num 为 期望经过途径点个数
-
依次修改对应途径点坐标
<arg name="point0_x" value="16.0" /> <arg name="point0_y" value="0.0" /> <arg name="point0_z" value="1.2" /> -
起飞步骤和部署飞行部分相同,使用 Rviz 的 2D Nav Goal 任意选点触发规划执行。